
Framed with a delicate whispy prom, AR11664 slowly nears the suns western limb. Taken with the SS70 @ f15 with the DMK31. A great start to the 2013 solar season!

Images of the Sun, our local star, at a range of wavelengths with specialist solar telescopes. Imaging tutorials, solar bits and pieces for sale, talks and outreach with the Charlie Bates Solar Astronomy Project CBSAP.
Monday, 28 January 2013
Southerly Proms 27th January

Plenty of small proms on sunday. Taken with the SS70 @ f15 with the DMK31.
CaK Closeup - 27th January

Didn't think this was going to come out at all, but it did! Taken with the 70mm frac and 2x barlow giving f12 with the DMK31. Plenty of promise in this CaK filter me thinks!
Sunday, 27 January 2013
CaK Sun - 27th January 2013

I couldn't resist taking a picture of our star today in CaK wavelengths (393.4nm), when there aren't many large active regions about there is always something to see in these near ultra violet wavelengths. This was my first attempt at using a ND filter-less Lunt solar wedge as an ERF in conjunction with my own CaK filter stack; this worked as expected. Using the 70mm scope at f6 I was getting exposure times of 1/500 second. This is pretty good given the low altitude of the sun, and I expect certainly in summer to be imaging nearer 1/1000 second, which will be great to avoid image smearing due to the poor seeing that afflicts these shorter wavelengths. This also leaves plenty of light for imaging at longer focal lengths, again when seeing allows. Not all is as I would like with this setup; I am certain there is an infra red leak occuring somewhere, this is manifesting itself as a 'blooming' to the raw image. The CaK PST employs a soft coated silver ITF (induced transmission filter) in its original configuration, which certainly in visual inspection would appear to be exactly the same sort as is used with their Ha PST. The purpose of this filter is to essentially take out wavelengths >1500nm. The next time I get some decent imaging time I want to try and image with an ITF in the stack, and also trying in its place some Schott KG5 which has similar properties at these long wavelengths. I am fairly confident this will improve matters.
A Quiet Sun? 27th January 2013

It is being written in some places on the web that our star is inactive and there is little to see, well, I guess this depends just how close you look.
 Despite there only being a couple of named active regions in this photo, when you look closely there are several, as yet, unnamed active regions. The large single spot is fairly inactive and displays a classic light bridge dividing it in two, indicating that it is dying or decaying. Several small filaments can be seen draping the solar disk. The image was taken with my recently modified 70mm f6 workhorse scope, this today was running at f15, and these images show that despite suffering from less than ideal conditions for imaging today, this scope seems to strike a great balance between regular use in the battle against poor seeing, and getting a decent level of resolution.
Despite there only being a couple of named active regions in this photo, when you look closely there are several, as yet, unnamed active regions. The large single spot is fairly inactive and displays a classic light bridge dividing it in two, indicating that it is dying or decaying. Several small filaments can be seen draping the solar disk. The image was taken with my recently modified 70mm f6 workhorse scope, this today was running at f15, and these images show that despite suffering from less than ideal conditions for imaging today, this scope seems to strike a great balance between regular use in the battle against poor seeing, and getting a decent level of resolution.
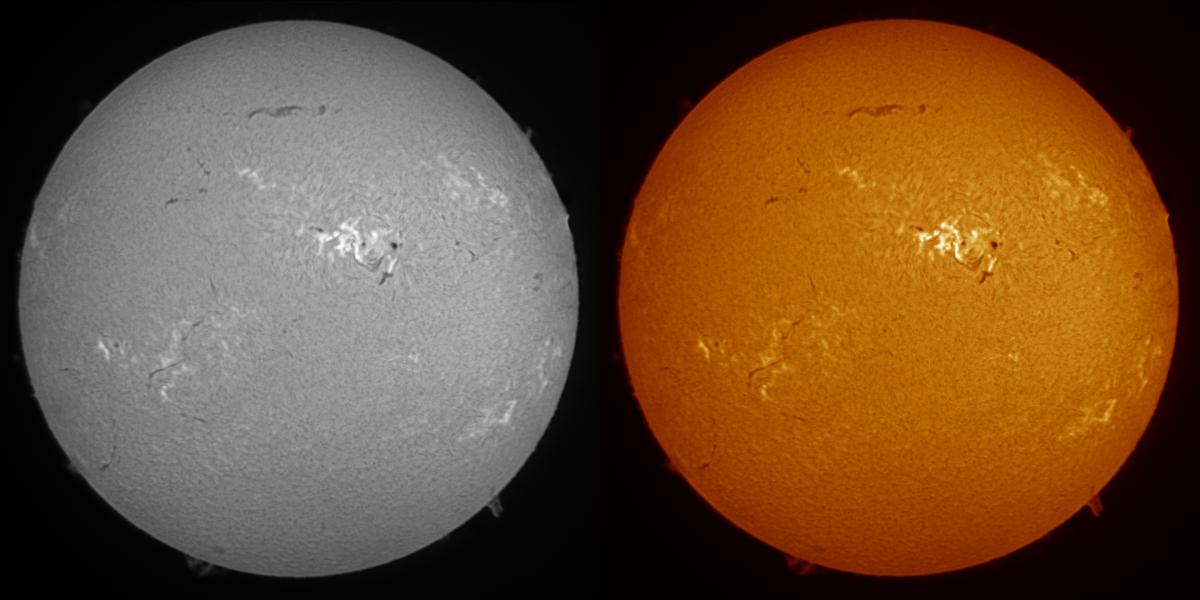
Whispy Proms - 27th January 2013

There was a great view of lovely row of whispy proms visible on our star today. Seeing wasn't that good as the sun was only 10 degrees above the horizon, but i'm pleased with the result!
 The image looks pretty good in black and white too, I can't decide which I prefer so have included both. Click on either to view larger. These were taken with my new 70mm PST mod. Today I decided to up the magnification and image using the 2x barlow lens, given the poor seeing conditions with a cold front just passing through causing instability in the atmosphere (and the low sun!) i'm surprised how well it came out. This is good omen as if produces good results in these circumstances then in better conditions the results can only get better.
The image looks pretty good in black and white too, I can't decide which I prefer so have included both. Click on either to view larger. These were taken with my new 70mm PST mod. Today I decided to up the magnification and image using the 2x barlow lens, given the poor seeing conditions with a cold front just passing through causing instability in the atmosphere (and the low sun!) i'm surprised how well it came out. This is good omen as if produces good results in these circumstances then in better conditions the results can only get better. Hedgerow Prom Closeup - 26th January
A lovely hedgerow prominence seen here taken with the SS70 PST mod @ f15 with the DMK31 camera. The sun is well and truly above the trees, the 2013 solar season is properly underway!

A Flock Of Starlings Cross The Sun - Saturday 26th January
You can tell the sun is still low in the sky when you get flocks of birds crossing the face, and this is what happened on saturday with a flock of starlings. This animation also shows how our turbuilent atmosphere makes the image boil away with poor seeing, this should improve as we get later in the year and the sun gets higher. Taken with the 70mm @ f12 with the DMK31.
Saturday, 26 January 2013
Suntastic Solar Saturday - 26th January

Today was a great day for solar observing; the sun is now higher in the sky and finally now properly clears the treeline from my local horizon, this now gives me a window of a good couple of hours to observe should the clouds ever part. Fortunately, today they did, if only for a hour or so, but this was more than long enough for me to try out my latest modded solar scope. I've added the 70mm Baader D-ERF (as per my review earlier on this website) and a different collimating lens to my trusty 70mm f6 refractor and threw on a PST etalon. This gives me a 70mm 520mm fl solar scope. The image above was taken 70mm f12 with the DMK31 and shows that this mod is working well. Infact I find it difficult to choose between the colour and black and white versions of this shot...
 Despite the sun only being 16deg altitude in the sky, and instability caused by surrounding snow and ice and the warmer maritime air that is now over us, the resultant image has came out pretty good. 70mm seems a good balance of resolution and ability to use on a regular basis based on the often poor local seeing conditions I often have in an urban sky scape. This short focus scope offers great mechanics and portability, making it ideal for travel / outreach. I'm looking forward to using this 'new' scope on a regular basis in 2013 while we're at solar maximum, there will be plenty of activity to see!
Despite the sun only being 16deg altitude in the sky, and instability caused by surrounding snow and ice and the warmer maritime air that is now over us, the resultant image has came out pretty good. 70mm seems a good balance of resolution and ability to use on a regular basis based on the often poor local seeing conditions I often have in an urban sky scape. This short focus scope offers great mechanics and portability, making it ideal for travel / outreach. I'm looking forward to using this 'new' scope on a regular basis in 2013 while we're at solar maximum, there will be plenty of activity to see!
Update on Solar Cycle 24

If you've been following my updates on the development of solar cycle 24, then I have to say the most recent graph issued by NOAA isn't exactly inspiring. This solar cycle would have appeared to have peaked not only early but also quite considerably less intense than predicted. It is going to have to take quite an upturn in activity now to get things back to what we were hoping to expect...
Wednesday, 23 January 2013
Lunt Solar Wedge - From The Inside Out...

Thought it was time to do an unconventional look at the Lunt Solar Wedge - from the Inside out. In particular to see how the wedge itself works, how it is put together including a look at it's build quality, and also how it could be adapted for long focal length white light imaging when the CCD exposure is getting a bit too long and seeing effects are starting to manifest themselves, but also how it could be used for an ERF for a CaK imaging system . All explained in the video below!
Sunday, 20 January 2013
Nyquist Sampling Theory, Undersampling, Oversampling and Solar Astronomy
Much has been written about Nyquist sampling theory, and the undersampling and oversampling of images from a general astro imaging perspective, normally from the point of view of planetary imaging; however there is little specific information on this from a solar imaging perspective. The purpose of this article is to demonstrate it's relevance to solar imaging, clarifying how to tailor the focal length of the imaging system used to not only the camera but also to the wavelength being observed. In particular it is hoped that it will help explain why when imaging at CaK wavelengths the results are often not as good as imagers may hope for.
Background
In simple terms, the question we are trying to answer here is what is the ideal focal length that we need to image with, using a camera of particular pixel size and at a particular wavelength to record the information such that none of it is 'lost' as a result of undersampling. Undersampling is when the theoretical angular resolution of the sensor being used is worse than that of the telescope, in this case this is undesirable in most situations, as we are not recording all of the image data our telescopes are capable of delivering - we are wasting aperture, and in terms of solar astronomy, aperture is the real estate that costs the most to buy in the first place.
Nyquist Sampling Theorem
This is the key in terms of dictating the optimum minimum focal length needed with a particular scope and camera to ensure that images are not undersampled. Nyquist sampling theorem states that the sampling frequency of an image (in our case) must be twice that of the smallest feature we can record, in other words the smallest feature must be imaged over 2 pixels on the CCD chip. Now, theoretically, the smallest feature we can record is that of the resolution of the scope, however, such is the case with daytime imaging, the seeing conditions are not as we would like due to thermal turbulence, and, as such, it is likely to be the local seeing conditions that dictate the smallest feature we can record.
Resolution
 The theoretical resolution of a telescope of particular aperture at a particular wavelength is given by the formula opposite. Whereby alpha is the theoretical resolution of the telescope in arc seconds, Lambda is the wavelength of light in mm (1 nm = 10-6 mm) and D is the diameter of the telescope in mm. However, from our perspective of solar astronomy this is where things start to get different from planetary imaging as we image in very narrow bandwidths at opposite ends of the visible spectrum and this has some important consequences: If we consider a 100mm telescope imaging at hydrogen alpha wavelengths at 656.28nm, then the resolution of this optical system (seeing permitting) is 1.65" (arc seconds). Now, assume we use the same 100mm scope to observe at CaK wavelengths at 393.4nm, we find the resolving power is much improved at 0.99" (arc seconds). Resolution is a function of wavelength observed, and at shorter wavelengths we have improved resolution compared to longer wavelengths. Now, remember what we said earlier that it is often the local seeing conditions that dictate the maximum resolution we can achieve rather than the telescope aperture, and we can see why CaK imaging is more difficult and often spoiled more by poor seeing than imaging like for like at Ha wavelengths. However, this is not all that affects CaK imaging...
The theoretical resolution of a telescope of particular aperture at a particular wavelength is given by the formula opposite. Whereby alpha is the theoretical resolution of the telescope in arc seconds, Lambda is the wavelength of light in mm (1 nm = 10-6 mm) and D is the diameter of the telescope in mm. However, from our perspective of solar astronomy this is where things start to get different from planetary imaging as we image in very narrow bandwidths at opposite ends of the visible spectrum and this has some important consequences: If we consider a 100mm telescope imaging at hydrogen alpha wavelengths at 656.28nm, then the resolution of this optical system (seeing permitting) is 1.65" (arc seconds). Now, assume we use the same 100mm scope to observe at CaK wavelengths at 393.4nm, we find the resolving power is much improved at 0.99" (arc seconds). Resolution is a function of wavelength observed, and at shorter wavelengths we have improved resolution compared to longer wavelengths. Now, remember what we said earlier that it is often the local seeing conditions that dictate the maximum resolution we can achieve rather than the telescope aperture, and we can see why CaK imaging is more difficult and often spoiled more by poor seeing than imaging like for like at Ha wavelengths. However, this is not all that affects CaK imaging...


Looking at some scopes in my own setup, the Tal 100mm refractor (1000mm fl) which I use for my PST mod and also for CaK imaging and my DMK31 (4.65micron pixel pitch), for Ha this yields an ideal focal length of 1417mm - interesting that I found using my 1.6x barlow gave excellent results at 1600mm... However, at CaK wavelengths the ideal focal length works out at 2364mm; great in theory, but I know from experience there are only a couple of times a year I can use this setup in CaK at such a long focal length with the Televue 2.5x powermate - however, when I can the results are worth it!
If I consider my 118mm PST mod, this is 1180mm fl, and the DMK31, then the theory tells us the optimum focal length to image at is 1672mm - very close to the ~1900mm fl that I find works best most often when using the 1.6x barlow. at CaK, this scope would perform without undersampling at a whopping 2800mm fl! I've only been able to image in CaK at this fl a couple of times in the last several years!
So, using the above formula and the specifics of your own system you should be able to work out the ideal focal length for you to avoid undersampling.
To Undersample, To Oversample?
OK, this theory is all good and well but what about real world practise? It's far from the end of the world if you do undersample - infact this can often produce some of the most contrasty images, however, the point is, if you image at or above the ideal focal length as prescribed by Nyquists sampling theorem then you are recording all the detail your scope and camera are theoretically capable of. That is, assuming the seeing conditions allow, the shorter wavelengths of CaK mean that not only are you susceptible to the effects of poorer seeing, but as per Nyquist the resultant amplification factor you must apply is also higher than longer wavelengths - a double whammy! But looking from another perspective undersampling increases the field of view on the chip and also decreases the contribution of noise from the chip on the resultant image.
Well what about oversampling? we haven't spoke of this yet. Well in simple terms this is just cranking up the focal length and going hi-res - but what are the limits? what is the optimum? Sadly Nyquist doesn't tell us this, all it tells us is the minimum ideal focal length. In simple terms how much you oversample is going to depend upon your own observing circumstances. In my situation, even at Ha wavelengths I can rarely use more than 2x / 3x the native focal length of my scopes due to poor urban seeing, however, I know from experience from the images of others that in the right observing conditions, with excellent seeing and transparency, it is possible to image at 4x / 5x the native focal length quite successfully. It is not wise to oversample more than necessary, in this case the angular resolution of the telescope is better than that of the CCD chip and as is seen as overly magnified images, the sensitivity of the CCD chip is not being effectively utilised - the exposure time needed becomes progressively longer and also noise levels become higher, decreasing the signal to noise ratio of the final image.
Conclusion
As with everything, solar imaging is all about compromises, and the point of this article is not to tell people not to undersample their images, rather to be aware of the constraints that certain setups impose. People like the convenience of imaging a solar full disk in one frame without having to mosaic, and that is understandable, but they must also be aware that the resultant image lacks the spatial resolution that it potentially could have if it was sampled at a longer focal length. Then there is the poor seeing factor - if the seeing is bad drop the focal length to hide the poor seeing in your images! However, if you are looking to get the optimum detail from your setup then you need to be running at least at the focal length as determined by Nyquist, if not exceeding it. How much you exceed it, assuming perfect seeing, in my opinion, is governed by the transparency of your observing site - the better the transparency the more you can oversample.
However, cast your mind back to Nyquists sampling theorem, it is a mathematical equation, and as such we can play around with the variables to increase our chances of successful imaging.
Background
In simple terms, the question we are trying to answer here is what is the ideal focal length that we need to image with, using a camera of particular pixel size and at a particular wavelength to record the information such that none of it is 'lost' as a result of undersampling. Undersampling is when the theoretical angular resolution of the sensor being used is worse than that of the telescope, in this case this is undesirable in most situations, as we are not recording all of the image data our telescopes are capable of delivering - we are wasting aperture, and in terms of solar astronomy, aperture is the real estate that costs the most to buy in the first place.
Nyquist Sampling Theorem
This is the key in terms of dictating the optimum minimum focal length needed with a particular scope and camera to ensure that images are not undersampled. Nyquist sampling theorem states that the sampling frequency of an image (in our case) must be twice that of the smallest feature we can record, in other words the smallest feature must be imaged over 2 pixels on the CCD chip. Now, theoretically, the smallest feature we can record is that of the resolution of the scope, however, such is the case with daytime imaging, the seeing conditions are not as we would like due to thermal turbulence, and, as such, it is likely to be the local seeing conditions that dictate the smallest feature we can record.
Resolution
 The theoretical resolution of a telescope of particular aperture at a particular wavelength is given by the formula opposite. Whereby alpha is the theoretical resolution of the telescope in arc seconds, Lambda is the wavelength of light in mm (1 nm = 10-6 mm) and D is the diameter of the telescope in mm. However, from our perspective of solar astronomy this is where things start to get different from planetary imaging as we image in very narrow bandwidths at opposite ends of the visible spectrum and this has some important consequences: If we consider a 100mm telescope imaging at hydrogen alpha wavelengths at 656.28nm, then the resolution of this optical system (seeing permitting) is 1.65" (arc seconds). Now, assume we use the same 100mm scope to observe at CaK wavelengths at 393.4nm, we find the resolving power is much improved at 0.99" (arc seconds). Resolution is a function of wavelength observed, and at shorter wavelengths we have improved resolution compared to longer wavelengths. Now, remember what we said earlier that it is often the local seeing conditions that dictate the maximum resolution we can achieve rather than the telescope aperture, and we can see why CaK imaging is more difficult and often spoiled more by poor seeing than imaging like for like at Ha wavelengths. However, this is not all that affects CaK imaging...
The theoretical resolution of a telescope of particular aperture at a particular wavelength is given by the formula opposite. Whereby alpha is the theoretical resolution of the telescope in arc seconds, Lambda is the wavelength of light in mm (1 nm = 10-6 mm) and D is the diameter of the telescope in mm. However, from our perspective of solar astronomy this is where things start to get different from planetary imaging as we image in very narrow bandwidths at opposite ends of the visible spectrum and this has some important consequences: If we consider a 100mm telescope imaging at hydrogen alpha wavelengths at 656.28nm, then the resolution of this optical system (seeing permitting) is 1.65" (arc seconds). Now, assume we use the same 100mm scope to observe at CaK wavelengths at 393.4nm, we find the resolving power is much improved at 0.99" (arc seconds). Resolution is a function of wavelength observed, and at shorter wavelengths we have improved resolution compared to longer wavelengths. Now, remember what we said earlier that it is often the local seeing conditions that dictate the maximum resolution we can achieve rather than the telescope aperture, and we can see why CaK imaging is more difficult and often spoiled more by poor seeing than imaging like for like at Ha wavelengths. However, this is not all that affects CaK imaging...
The Ideal Focal Length
So, according to Nyquists sampling theorem, for a particular aperture, particular sized pixels on our camera and for a particular wavelength, there is a minimum focal length we ideally should be working at to avoid undersampling. The formula for this is as below:


Whereby, F is the desired focal length in mm, dpixel is the width of the pixel in microns, D is the diameter of the telescopes objective in mm, and Lambda is the wavelength in nm.
So, lets put some numbers in this and see what happens:
Take for example a Coronado Ha PST (40mm D, 400mm fl) with a DMK41 camera (4.4micron pixel pitch), using the equation gives us an ideal focal length of 536mm, not too far off the native focal length of this scope, but a little image amplification would result in a little more detail visible in the resultant image.
Now let us consider a Coronado CaK PST, same spec, same CCD, these yields an optimum focal length of 894mm to avoid undersampling. Using a 2x barlow in this instance would result in more detail in the final image if the seeing allowed. Don't get me wrong, I'm not saying imaging with this scope at its native focal length is not going to be effective, full disk images are great with this setup - what I am saying is that at native focal length some of the finer details are being lost and these could be recovered if imaged using a 2x / 2.5x barlow.
Now a 60mm Coronado SolarmaxII scope, with 400mm fl and a DMK41, the ideal focal length to avoid undersampling is 804mm, so, again, a 2x barlow lens is needed to get the best out of this scope!
Lets look at an 80mm f6 refractor and a DMK51 and a Lunt CaK wedge: To avoid undersampling we need to be running at 1789mm focal length (!!!) - compared to the native focal length of 480mm. To get to the limit as prescribed by Nyquist you would be needing to use a 3x / 4x barlow lens, however less than this you are wasting the resolution that the 80mm offers, and with CaK there are alot of fine details.
Looking at some scopes in my own setup, the Tal 100mm refractor (1000mm fl) which I use for my PST mod and also for CaK imaging and my DMK31 (4.65micron pixel pitch), for Ha this yields an ideal focal length of 1417mm - interesting that I found using my 1.6x barlow gave excellent results at 1600mm... However, at CaK wavelengths the ideal focal length works out at 2364mm; great in theory, but I know from experience there are only a couple of times a year I can use this setup in CaK at such a long focal length with the Televue 2.5x powermate - however, when I can the results are worth it!
If I consider my 118mm PST mod, this is 1180mm fl, and the DMK31, then the theory tells us the optimum focal length to image at is 1672mm - very close to the ~1900mm fl that I find works best most often when using the 1.6x barlow. at CaK, this scope would perform without undersampling at a whopping 2800mm fl! I've only been able to image in CaK at this fl a couple of times in the last several years!
So, using the above formula and the specifics of your own system you should be able to work out the ideal focal length for you to avoid undersampling.
To Undersample, To Oversample?
OK, this theory is all good and well but what about real world practise? It's far from the end of the world if you do undersample - infact this can often produce some of the most contrasty images, however, the point is, if you image at or above the ideal focal length as prescribed by Nyquists sampling theorem then you are recording all the detail your scope and camera are theoretically capable of. That is, assuming the seeing conditions allow, the shorter wavelengths of CaK mean that not only are you susceptible to the effects of poorer seeing, but as per Nyquist the resultant amplification factor you must apply is also higher than longer wavelengths - a double whammy! But looking from another perspective undersampling increases the field of view on the chip and also decreases the contribution of noise from the chip on the resultant image.
Well what about oversampling? we haven't spoke of this yet. Well in simple terms this is just cranking up the focal length and going hi-res - but what are the limits? what is the optimum? Sadly Nyquist doesn't tell us this, all it tells us is the minimum ideal focal length. In simple terms how much you oversample is going to depend upon your own observing circumstances. In my situation, even at Ha wavelengths I can rarely use more than 2x / 3x the native focal length of my scopes due to poor urban seeing, however, I know from experience from the images of others that in the right observing conditions, with excellent seeing and transparency, it is possible to image at 4x / 5x the native focal length quite successfully. It is not wise to oversample more than necessary, in this case the angular resolution of the telescope is better than that of the CCD chip and as is seen as overly magnified images, the sensitivity of the CCD chip is not being effectively utilised - the exposure time needed becomes progressively longer and also noise levels become higher, decreasing the signal to noise ratio of the final image.
Conclusion
As with everything, solar imaging is all about compromises, and the point of this article is not to tell people not to undersample their images, rather to be aware of the constraints that certain setups impose. People like the convenience of imaging a solar full disk in one frame without having to mosaic, and that is understandable, but they must also be aware that the resultant image lacks the spatial resolution that it potentially could have if it was sampled at a longer focal length. Then there is the poor seeing factor - if the seeing is bad drop the focal length to hide the poor seeing in your images! However, if you are looking to get the optimum detail from your setup then you need to be running at least at the focal length as determined by Nyquist, if not exceeding it. How much you exceed it, assuming perfect seeing, in my opinion, is governed by the transparency of your observing site - the better the transparency the more you can oversample.
However, cast your mind back to Nyquists sampling theorem, it is a mathematical equation, and as such we can play around with the variables to increase our chances of successful imaging.
First of all the easiest thing to alter is D - an imager can step down the diameter of their telescope, reducing this reduces the optimum focal length. Secondly, an imager could choose a CCD camera with a smaller pixel pitch - for instance using a PGR Flea 2 with ICX445 chip yields a pixel pitch of 3.75microns (compared to say DMK21 with 5.6micron pixel pitch) - this will also reduce the optimum focal length. It would be interesting to see if imagers with more than one camera with differing pixel pitches find the smaller pitched pixel camera shows better results, particularly at CaK wavelengths. A combination of both of these variables is likely to achieve best results in CaK. The final variable we can change is the wavelength of the light we are observing - while this is quite clearly impossible at narrowband Ha and CaK wavelengths, white light solar is a different matter, and imaging at longer wavelengths can help to match the pixel pitch of the camera better with the focal length. This approach definitely works for instance as demonstrated by several imagers with the 705nm TiO2 filter, or other long wavelength narrowband filters.
I hope you find this discussion helpful and gives and insight into the way that you take your solar images with respect to your individual setups. I would welcome comments or discussion into the issues it raises.
Tuesday, 15 January 2013
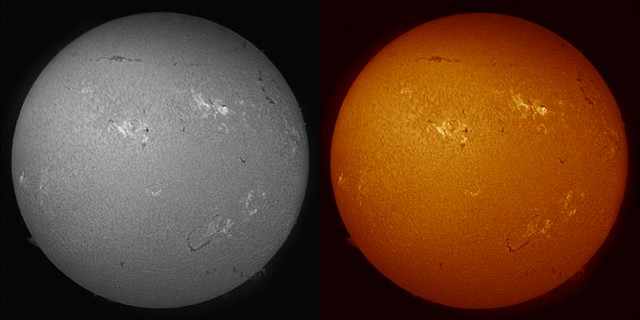
Cracking The CaK Code - First Look at the Blue Side For 2013 - January 15th

I managed to get my first CaK images of the sun today as can be seen above, whilst the image itself is fairly unremarkable - there's some shadowing from a tree that was in the foreground, and the disk is fairly blank apart from the giant spots associated with AR11654, it is how the image was filtered that is significant.
 Traditionally there is only a few ways to observe our star in narrowband CaK wavelengths; Lunt CaK module, Coronado CaK PST and Daystar filters. In my mind there are issues with all 3 - the CaK PST is no longer made, the Lunt is expensive and the Daystar is really expensive. For some time I have been using a CaK PST mod - basically using the filters from this in larger refractors. Today represents a mile stone in taking this a step further; the picture to the left shows the filter that I assembled and used to take the image above.
Traditionally there is only a few ways to observe our star in narrowband CaK wavelengths; Lunt CaK module, Coronado CaK PST and Daystar filters. In my mind there are issues with all 3 - the CaK PST is no longer made, the Lunt is expensive and the Daystar is really expensive. For some time I have been using a CaK PST mod - basically using the filters from this in larger refractors. Today represents a mile stone in taking this a step further; the picture to the left shows the filter that I assembled and used to take the image above.
For some time I have been trying to crack the CaK filter code, and now I think I am 90% there. The stack in the image is really simple; a Baader K-Line filter and a longpass filter. There is then a 0.5x reducer on a short nosepeice to get a full disk with the DMK31. The theory behind it is quite simple - the K-line has an 8nm wide pass band, this shows on its own a very watered down and washed out view of CaK. However by inserting a longpass filter into the stack this has the effect of really narrowing down and tightening up the banpass, to the point it is very comparable with the 2.2A pass of the CaK PST and the 2.4A pass of the Lunt. The key is the longpass filter, and after much researching i'm fairly certain I know the specification of this filter, in the coming months I will be purchasing these longpass filters from a range of manufacturers and trialling them to see which performs the best. If the theory is correct, and so far it all is, i'm hoping to be able to put together a filter recipe for imaging at CaK wavelengths at 20% the cost of the cheapest commercial alternatives. Watch this space!
Unexpected Tuesday Sun & Testing a New Scope - 15th January
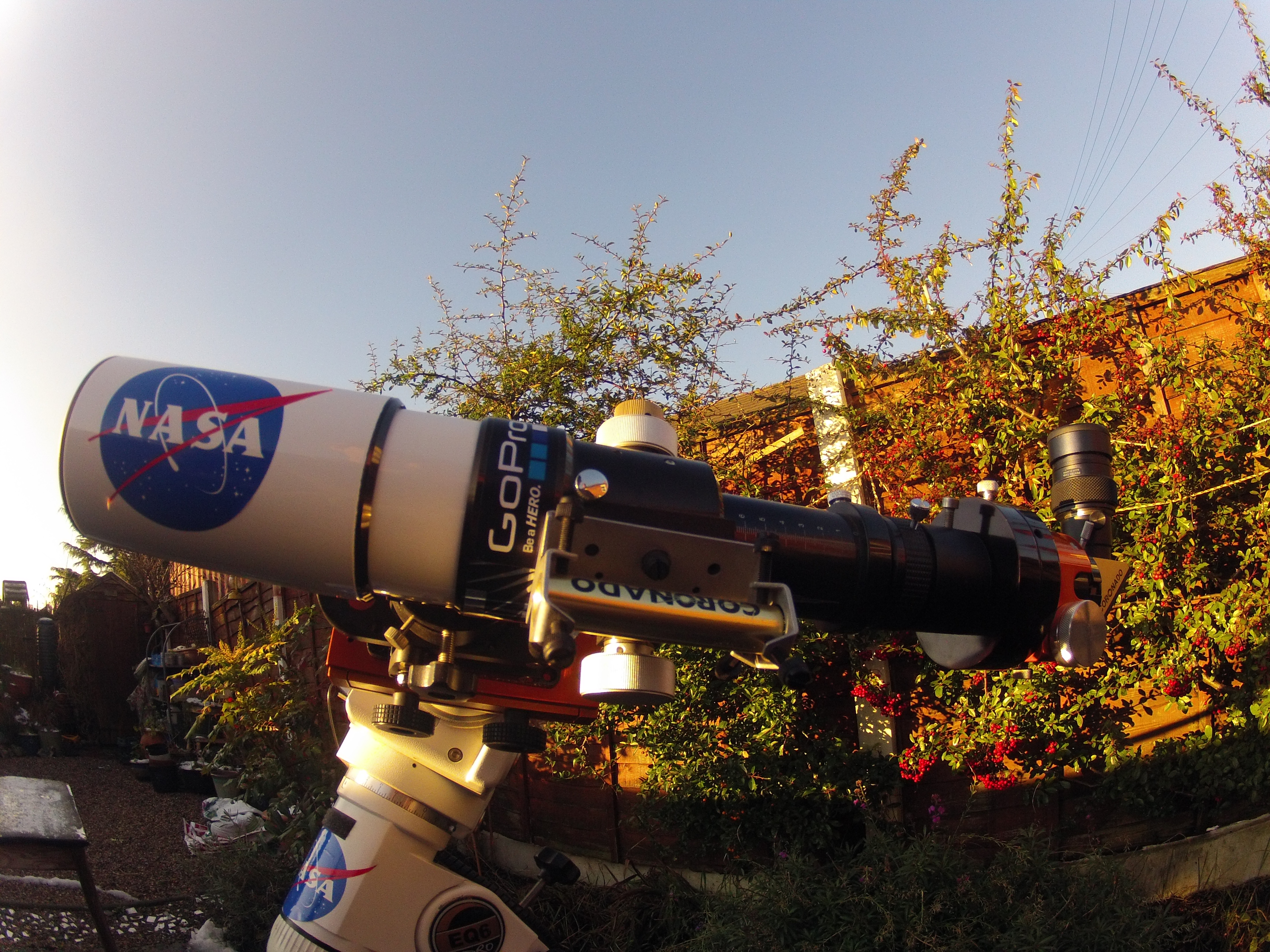 I also had enough blue skies to do a visual test of a prototype scope i'm currently making. This is going to be a 70mm f6 PST mod, using my workhorse 70mm refractor pictured. I really like this scope as the 420mm focal length allows easy full disk imaging. The jump from 40mm PST to 70mm aperture is quite significant and allows alot more structure to be seen on both the disk and also with prominences on the limb. It also allows a much higher magnification to be used visually. The scope is very portable and collapses down into next to nothing size wise when travelling. From my location 70mm seems to be an aperture I can use regularly without suffering the detrimental effects of seeing.
I also had enough blue skies to do a visual test of a prototype scope i'm currently making. This is going to be a 70mm f6 PST mod, using my workhorse 70mm refractor pictured. I really like this scope as the 420mm focal length allows easy full disk imaging. The jump from 40mm PST to 70mm aperture is quite significant and allows alot more structure to be seen on both the disk and also with prominences on the limb. It also allows a much higher magnification to be used visually. The scope is very portable and collapses down into next to nothing size wise when travelling. From my location 70mm seems to be an aperture I can use regularly without suffering the detrimental effects of seeing.  The scope uses a 75mm Baader D-ERF as the primary filter as can be seen in the shot on the right. This is mounted in a custom designed and made acrylic cell that sits with an interference fit inside the dew shield of the scope. This is easily removeable by simply unscrewing the locating ring on the dew shield when the scope is needed for CaK duties. For the scope to work at it's optimum I have had to replace the collimating lens on the PST etalon assembly from its native f10 lens, to a f6 alternative. Edmunds Optics provided the necessary glassware in the form of a 40mm x -120mm fl negative focal length achromatic lens. This will be stopped down to 20mm to match the aperture of the etalon of the PST assembly, and, in the process will take the focal ratio to f6 to match that of the donor scope OTA. Whilst I am currently awaiting delivery of this lens, I tried in it's place a 40mm x -80mm fl lens from a barlow that I had lying around. While this was not going to give a collimated beam going into the etalon assembly I was keen to see what it would show: promienences were very apparent as was some disk detail in the centre of the field of view. The image very quickly went off band away from the centre of the field of view and sweetspotting was very apparent, however, this is exacttly what would be expected from using a collimating lens of the wrong specification! What it did show well was a good indication of image brightness and also what magnification I can expect to use with this setup. All in all i'm very pleased with how it is developing and are looking forward to first light properly hopefully in a couple of weeks time.
The scope uses a 75mm Baader D-ERF as the primary filter as can be seen in the shot on the right. This is mounted in a custom designed and made acrylic cell that sits with an interference fit inside the dew shield of the scope. This is easily removeable by simply unscrewing the locating ring on the dew shield when the scope is needed for CaK duties. For the scope to work at it's optimum I have had to replace the collimating lens on the PST etalon assembly from its native f10 lens, to a f6 alternative. Edmunds Optics provided the necessary glassware in the form of a 40mm x -120mm fl negative focal length achromatic lens. This will be stopped down to 20mm to match the aperture of the etalon of the PST assembly, and, in the process will take the focal ratio to f6 to match that of the donor scope OTA. Whilst I am currently awaiting delivery of this lens, I tried in it's place a 40mm x -80mm fl lens from a barlow that I had lying around. While this was not going to give a collimated beam going into the etalon assembly I was keen to see what it would show: promienences were very apparent as was some disk detail in the centre of the field of view. The image very quickly went off band away from the centre of the field of view and sweetspotting was very apparent, however, this is exacttly what would be expected from using a collimating lens of the wrong specification! What it did show well was a good indication of image brightness and also what magnification I can expect to use with this setup. All in all i'm very pleased with how it is developing and are looking forward to first light properly hopefully in a couple of weeks time.Sunday, 13 January 2013
Sunday Sun and Circumzenithal Arcs - 13th January
I was optimistic sunday would offer something in the way of clear skies following a night of freezing temperatures, however unsurprisingly the clouds played a game of cat and mouse all day; it would often be clear blue skies overhead, but around the horizon a mixture of haze, cloud and intermittent fog often conspired to hide the sun. It wasn't until late afternoon that all this thinned down enough to warrant me getting the double stacked PST.
 Even then the sky was far from clear, with the usual array of contrails and high cloud, however there was an optical effect that caught my eye - a circumzenithal arc. This is the rainbow like smile shape at the centre of the frame opposite. Circumzenithal Arcs (CZAs) it arises from refraction of sunlight through horizontally-oriented ice crystals, generally in cirrus clouds, rather than from raindrops. More details on them can be found here. This picture was taken with the HD Hero2 GoPro camera whose near fisheye lens is going to prove very useful for capturing optical effects like this.
Even then the sky was far from clear, with the usual array of contrails and high cloud, however there was an optical effect that caught my eye - a circumzenithal arc. This is the rainbow like smile shape at the centre of the frame opposite. Circumzenithal Arcs (CZAs) it arises from refraction of sunlight through horizontally-oriented ice crystals, generally in cirrus clouds, rather than from raindrops. More details on them can be found here. This picture was taken with the HD Hero2 GoPro camera whose near fisheye lens is going to prove very useful for capturing optical effects like this.The shot with the DS PST was by no means straightforward and took some getting too. I had decided as i'm still shooting on the photo tripod that I was going to use a focal reducer to get the whole disk on the chip of the DMK31. I rapidly realised the PST (as usual!) did not have enough back focus and so decided to remove the section of the eyepeice holder that holds the Induced Transmission Filter (ITF) - this had the effect of flooding the DMK with infra red radiation however would reach focus. I decided to resolve this by using a peice of heat absorbing KG5 glass in the optical train and using a Baader 7nm Ha filter on the front of the external etalon as an ERF. This sorted things out. The extra field of view the focal reducer gave me, along with keeping the exposure shorter than a 1/30 second meant I was recording at the full 30fps the DMK is capable of and as a result managed to record avis of nearly 2000 frames. Despite as can be seen from the sky shot above there was passing clouds, the image of the sun came out very well for the conditions. The other positive was that it was fairly obvious looking today the sun is slowly but surely getting higher and higher in the sky which is only a good thing for solar observing!
Saturday, 12 January 2013
Our Insignificant Earth - Putting AR11654 Into Perspective: 12th January
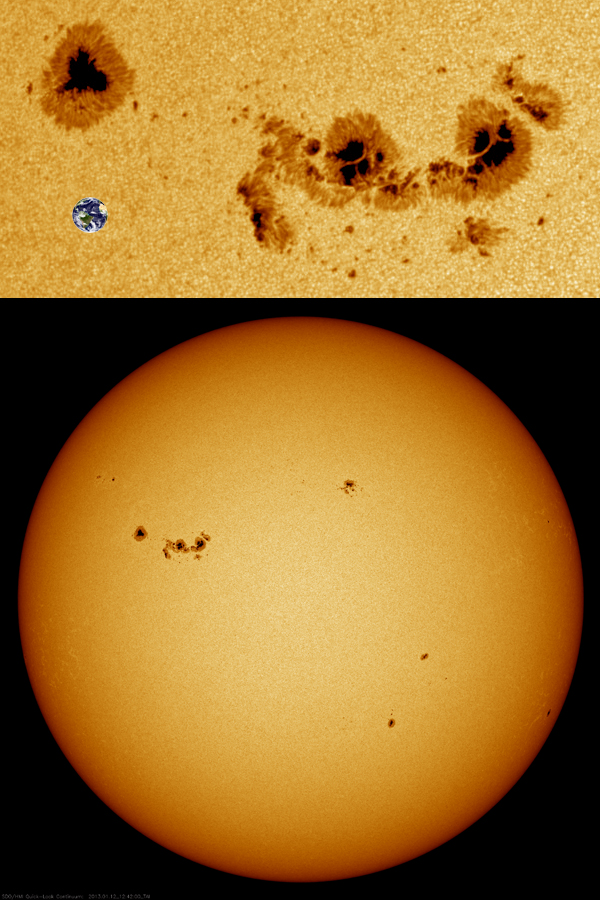
Our Earth really is insignificant in size when it comes to monster active region AR11654. One of the largest spot groups for sometime this active region just keeps on getting larger and is crackling with M-class flare activity with its complex beta-gamma magnetic configuration, the possibility of maybe even an X-class flare. As the behemoth nears the centre of our stars disk it becomes more geo-effective as time passes by, northern sky watchers should be altert to the possibilty of increased auroral activity in the coming days as a result of this and also a high speed flow of solar wind associated with a coronal hole. This image was derived from SDO data from the 12th January.
Friday, 11 January 2013
The Changing Shape of AR11654 - 11th january

Monster active region AR11654 as it rotates into a more geoeffective position is gradually starting to contort and twist in shape. Solar observers should keep a close eye on it as over the past 24 hours has thrown out several M - class flares.
AR11654 - Monster Sunspot Rotates Into View!

2013 is kicking off to a great start as far as our star is concerned, not only has it absoluetly erupted in spots compared to 2012, but now we have one of the largest spots for some considerable time rotating into view over the limb. It's a monster - currently 4 times larger than planet Earth. The 2 sunspots that make up this active region are connected by a canopy of strong magnetic fields, which are presently crackling with low-level C-flares. Much stronger eruptions are possible. NOAA forecasters estimate a 40% chance of M-class flares and a 5% chance of X-flares during the next 24 hours.
Sunday, 6 January 2013
Solar Dynamics Observatory Animation: 1st - 5th January
Our star has suddenly sprung to life with activity as we passed into 2013. I made this animation using hourly images from the SDO between the 1st and 5th January and it shows well how the number of sunspots has inceased dramatically. Over the weekend, a profusion of new sunspot groups peppered the solar disk with dark cores - each one a potential source of eruptions. NOAA forecasters estimate a 35% chance of M-class flares and a 5% chance of X-flares during the next 24 hours.
Harold Zirin - Astrophysics Of The Sun

This is an entirely new edition of Harold Zirin's classic text on the solar atmosphere. Combining an introductory course in astrophysics with a comprehensive treatment of the theoretical and observational aspects of our present knowledge of the sun, the book has been completely updated. It includes a large number of spectacular new photographs, including many of the best solar pictures from the world's observatories. Professor Zirin was one of the leading scientists in his field. His lucid writing style, combined with considerable teaching experience, has resulted in a valuable and important textbook of astrophysics. Whether you are a beginner or experienced astronomer, amateur or pro, this book contains something that you don't know about the sun. It is perhaps the most complete source on solar astonomy available. It is written in a very "academic" style because it is intended for astrophysics graduate students and researchers, but it can be read by advanced amateurs who are not afraid of mathematical formulas. Sadly Professor Zirin died in January 2012 however his ifluential text lives on. Here follows his obituary from the BAAS:

Obituary: Harold Zirin (October 7, 1929 - January 3, 2012)
Dr. Harold Zirin, an emeritus professor of astrophysics at the California Institute of Technology, died on January 3, 2012, in Pasadena after a long battle with debilitating chronic obstructive pulmonary disease (COPD). His passion for solar astronomy led his undergraduate students in the 1970s to produce a comic book of him as an unassuming professor who became the super-hero “Captain Corona” whenever he stepped into a solar observatory.Hal was born in 1929 in Boston to immigrants from Russia and the Galician region of eastern Poland; he grew up in Bridgeport, Connecticut. Hal liked to recall that he had come a long way from helping out as a youngster on a chicken farm in New Jersey. His childhood interest in astronomy was aroused by a view of the moon’s craters and mountains through a young friend’s telescope. Hal’s precocity, and a telescope that he built, won him a Westinghouse Talent Search Prize and a Pepsi Cola Scholarship for Connecticut in 1946. These achievements came to the attention of the astronomer Bart Bok, who attracted him to Harvard where he stayed through completion of his Ph.D. in 1953.
After graduation, Hal worked briefly at the Rand Corporation in Santa Monica, CA. But his career there was cut short by failure to obtain security clearance because his father was a member of the Communist Party. Instead, he returned to Harvard as a teaching fellow and in 1954 he joined the High Altitude Observatory in Boulder, Colorado, a center for solar studies. There, George Gamov introduced him to Mary Fleming,and they were married in 1957.
Mary recalls how, in 1960-1961, she and Hal traveled by car to the Crimean Astrophysical Observatory, in perhaps the first scientific exchange with the U.S. that the Soviet Union permitted outside major cities. There, the six months of hands-on experience with solar telescopes and instrumentation convinced Hal of the importance of continuous solar observations at high angular resolution. This fruitful conviction was one of the most important lessons Hal passed on to students and post-docs who worked with him in later years.
In 1964 Hal accepted a professorship in astrophysics at the California Institute of Technology. A search of varied sites for high resolution solar observations was undertaken with the support of the noted Caltech physicist Robert Leighton. Reputedly, after careful measurements all over Southern California, the steadiest air was found in the Caltech parking lot! But the observatory site was chosen high in the San Bernardino mountains on the north shore of Big Bear Lake. There, steady air over the lake combined with clearer sky, promised observations even of faint structures in the sun’s outer, coronal atmospheric layers.
Hal was a born entrepreneur and with a small grant from Caltech and additional funds from the Fleischman Foundation, he built the Big Bear Solar Observatory (BBSO) and its support facilities. He also led solar-astronomy research at Caltech's Owens Valley Radio Observatory (OVRO) and developed that observatory's solar interferometer. Observations of the amazingly detailed solar structures from BBSO and OVRO produced many interesting insights into solar magnetism, flares, and magneto-hydrodynamic waves. In the 1960’s Hal’s fascination with the sun’s detailed structure was ahead of its time and, in some circles, this earned him a reputation as a “solar dermatologist.” Since then, all solar astronomers have come to recognize the importance of understanding solar phenomena at the smallest observable scales.
Hal’s achievements attracted an international group of students and post – docs, many of whom went on to make important contributions to understanding of the sun. At regular lunches he organized with solar researchers in the Caltech physics department and at nearby Carnegie Observatories, the sometimes more measured research approach of these colleagues complemented Hal’s ebullient style to produce valuable insights into the workings of our star.
In hopes of achieving full time coverage of rapidly evolving solar phenomena, Hal travelled in the 1970s from northern Sweden to the Negev Desert in Israel, where for some time he ran a solar telescope in cooperation with Tel Aviv University. Later, scientists trained at BBSO created successful solar observatories on lakes in India and China. Hal also mounted solar eclipse expeditions in Ceylon (Sri Lanka) in 1952, in the southern jungle of Mexico in 1970, and in Hawaii in 1991.
Hal’s broad knowledge of the sun is laid out in over 250 scientific papers and in his widely used texbook Astrophysics of the Sun (2nd edition, 1988). Unfortunately, increasing hypoxia prevented him from completing the third edition.
Harold Zirin’s generosity, intellectual capacity and energy will be greatly missed by all who were fortunate to work with him. He is survived by his wife, Mary Zirin, a free-lance translator-researcher in Russian literature; a son, Daniel Zirin, of Hastings Ranch, Colorado; a daughter, Dana Haigney of Altadena, California; and two grandsons: William and Jacob. The family asks that donations be made in Zirin’s name to National Jewish Health in Denver, Colorado.
Tuesday, 1 January 2013
New Years Day Sunshine - Bonus Pic!

Shooting the sun on an untracked camera tripod is a tricky business, there's only a certain number of frames that can be shot before it drifts out of the field of view meaning the resulting stacked frame can be noisier than would like. It took a bit of messing around with photoshop to get this image, but, got there in the end! Taken with the double stacked PST and DMK31 camera.
New Year Sun - 1st January 2013

Happy New Year Everybody!
Well after what seems like weeks of constant rain here in the UK, the 1st of january actually dawned with clear skies and the possibility of some settled weather, if only for a couple of days... I got out the double stacked PST on the photo tripod to see what our star had to show on the year that marks the height of solar maximum. I was pleasantly surprised to see several spots, active regions, filaments and prominences. With each passing day now the sun is getting gradually higher and higher in the sky which is a good thing for solar observing as we're looking through progressively less atmosphere and also fewer trees. I liked this animation as shows very well that in a week or so the sun will be that bit higher in the sky and not in the branches of this particular tree, thus extending my viewing window! The seeing conditions were awful today and the limb of the sun can be seen to be boiling away as a result of out turbulent atmosphere, however, as always, some sun is better than none at all!
Subscribe to:
Posts (Atom)